About xarray-simlab¶
xarray-simlab provides a framework to easily build custom computational models from a collection of modular components, called processes.
It also provides an extension to xarray (i.e., labeled arrays and datasets), that connects it to a wide range of Python libraries for processing, analysis, visualization, etc.
xarray-simlab is well integrated with other libraries of the PyData ecosystem such as dask and zarr.
In a nutshell¶
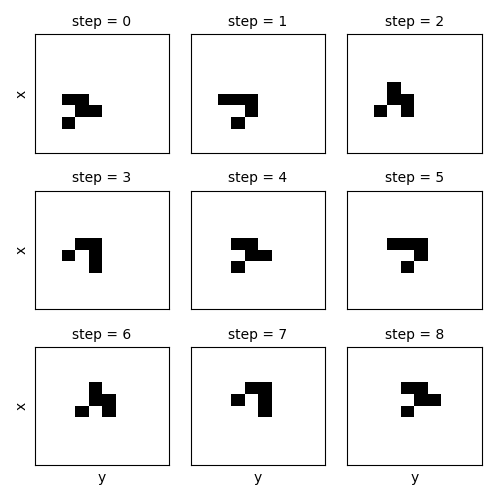
The Conway’s Game of Life example shown below is adapted from this blog post by Jake VanderPlas.
Create new model components by writing compact Python classes, i.e., very much like dataclasses (note: more features and Python < 3.7 support are also available through the attrs library):
In [1]: import numpy as np
...: import xsimlab as xs
...:
...:
...: @xs.process
...: class GameOfLife:
...: world = xs.variable(
...: dims=('x', 'y'), intent='inout', encoding={'fill_value': None}
...: )
...:
...: def run_step(self):
...: nbrs_count = sum(
...: np.roll(np.roll(self.world, i, 0), j, 1)
...: for i in (-1, 0, 1) for j in (-1, 0, 1)
...: if (i != 0 or j != 0)
...: )
...: self._world_next = (nbrs_count == 3) | (self.world & (nbrs_count == 2))
...:
...: def finalize_step(self):
...: self.world[:] = self._world_next
...:
...:
...: @xs.process
...: class Glider:
...: pos = xs.variable(dims='point_xy', description='glider position')
...: world = xs.foreign(GameOfLife, 'world', intent='out')
...:
...: def initialize(self):
...: x, y = self.pos
...:
...: kernel = [[1, 0, 0],
...: [0, 1, 1],
...: [1, 1, 0]]
...:
...: self.world = np.zeros((10, 10), dtype=bool)
...: self.world[x:x+3, y:y+3] = kernel
...:
Create a new model just by providing a dictionary of model components:
In [2]: model = xs.Model({'gol': GameOfLife,
...: 'init': Glider})
...:
Create an input
xarray.Dataset, run the model and get an output Dataset:
In [3]: input_dataset = xs.create_setup(
...: model=model,
...: clocks={'step': np.arange(9)},
...: input_vars={'init__pos': ('point_xy', [4, 5])},
...: output_vars={'gol__world': 'step'}
...: )
...:
...: output_dataset = input_dataset.xsimlab.run(model=model)
...:
...: output_dataset
...:
Out[3]:
<xarray.Dataset>
Dimensions: (point_xy: 2, step: 9, x: 10, y: 10)
Coordinates:
* step (step) int64 0 1 2 3 4 5 6 7 8
Dimensions without coordinates: point_xy, x, y
Data variables:
gol__world (step, x, y) bool False False False False ... False False False
init__pos (point_xy) int64 4 5
Perform model setup, pre-processing, run, post-processing and visualization in a functional style, using method chaining:
In [4]: import matplotlib.pyplot as plt
...:
...: with model:
...: (input_dataset
...: .xsimlab.update_vars(
...: input_vars={'init__pos': ('point_xy', [2, 2])}
...: )
...: .xsimlab.run()
...: .gol__world.plot.imshow(
...: col='step', col_wrap=3, figsize=(5, 5),
...: xticks=[], yticks=[],
...: add_colorbar=False, cmap=plt.cm.binary)
...: )
...:
Motivation¶
xarray-simlab is a tool for fast model development and easy, interactive model exploration. It aims at empowering scientists to do better research in less time, collaborate efficiently and make new discoveries.
Fast model development: xarray-simlab allows building new models from re-usable sets of components, with minimal effort. Models are created dynamically and instantly just by plugging in/out components, always keeping the model structure and interface tidy even in situations where the model development workflow is highly experimental or organic.
Interactive model exploration: xarray-simlab is being developed with the idea of reducing the gap between the environments used for building and running computational models and the ones used for processing, analyzing and visualizing simulation results. Users may fully leverage powerful environments like jupyter at all stages of their modeling workflow.
Sources of inspiration¶
xarray-simlab leverages the great number of packages that are part of the Python scientific ecosystem. More specifically, the packages below have been great sources of inspiration for this project.
xarray: xarray-simlab actually provides an xarray extension for setting up and running models.
attrs: a package that allows writing Python classes without boilerplate. xarray-simlab uses and extends attrs for writing processes as succinct Python classes.
luigi: the concept of Luigi is to use Python classes as re-usable units that help building complex workflows. xarray-simlab’s concept is similar, but here it is specific to computational (numerical) modeling.
django (not really a scientific package): the way that model processes are designed in xarray-simlab has been initially inspired from Django’s ORM (i.e., the
django.db.modelspart).param: another source of inspiration for the interface of processes (more specifically the variables that it defines).
climlab: another python package for process-oriented modeling, which uses the same approach although having a slightly different design/API, and which is applied to climate modeling.
landlab: like climlab it provides a framework for building model components but it is here applied to landscape evolution modeling. It already has a great list of components ready to use.
dask: represents fine-grained processing tasks as Directed Acyclic Graphs (DAGs). xarray-simlab models are DAGs too, where the nodes are interdepent processes. In this project we actually borrow some code from dask for resolving process dependencies and for model visualization.